Notre conception a débuté par plusieurs prototypes, tant pour le robot dans son ensemble que pour ses composants individuels. En rendant chaque composant majeur modulaire, nous avons pu les traiter simultanément dans différentes équipes.
Notre processus de conception s'est déroulé en trois étapes principales :
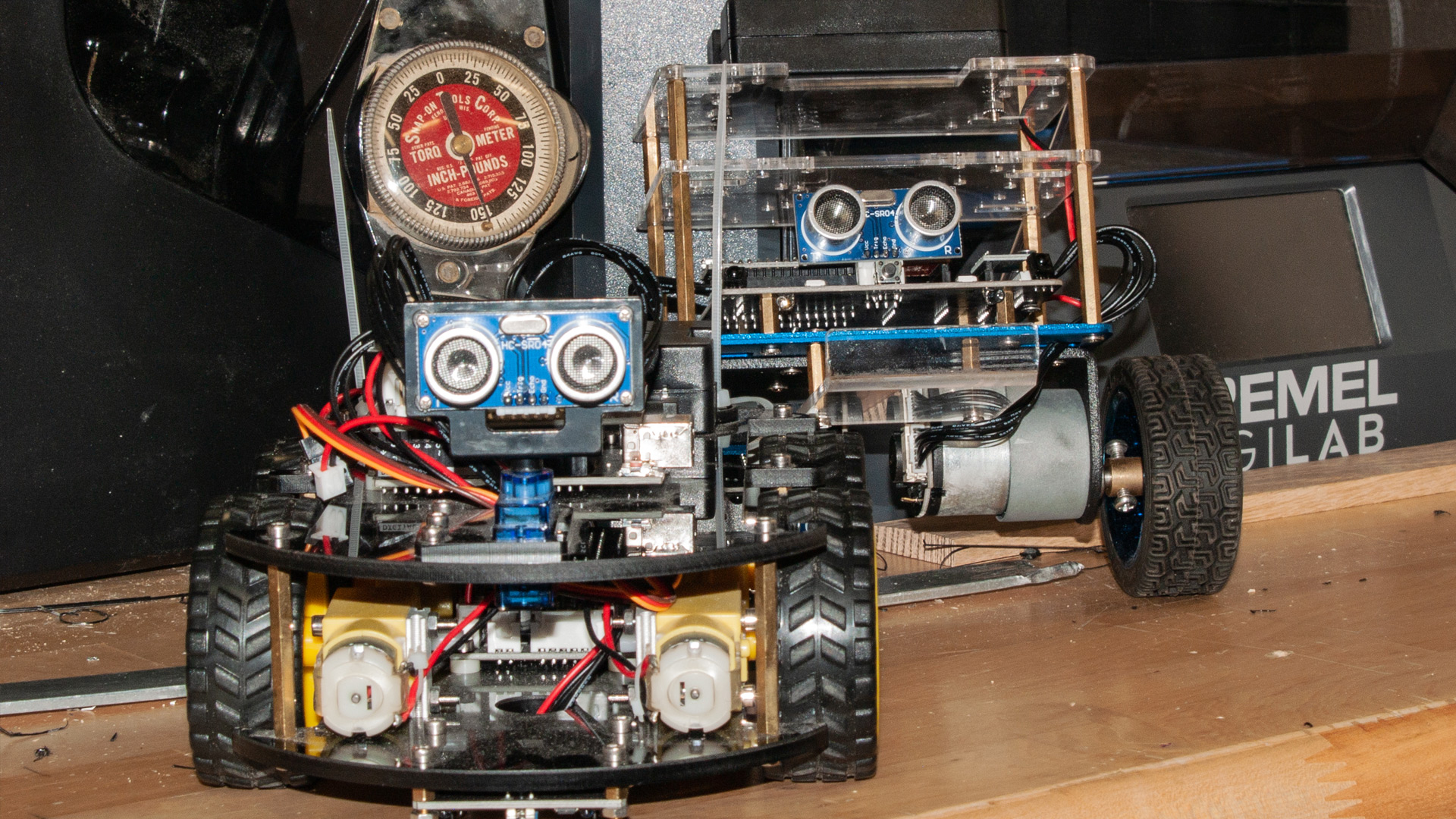
Prototype
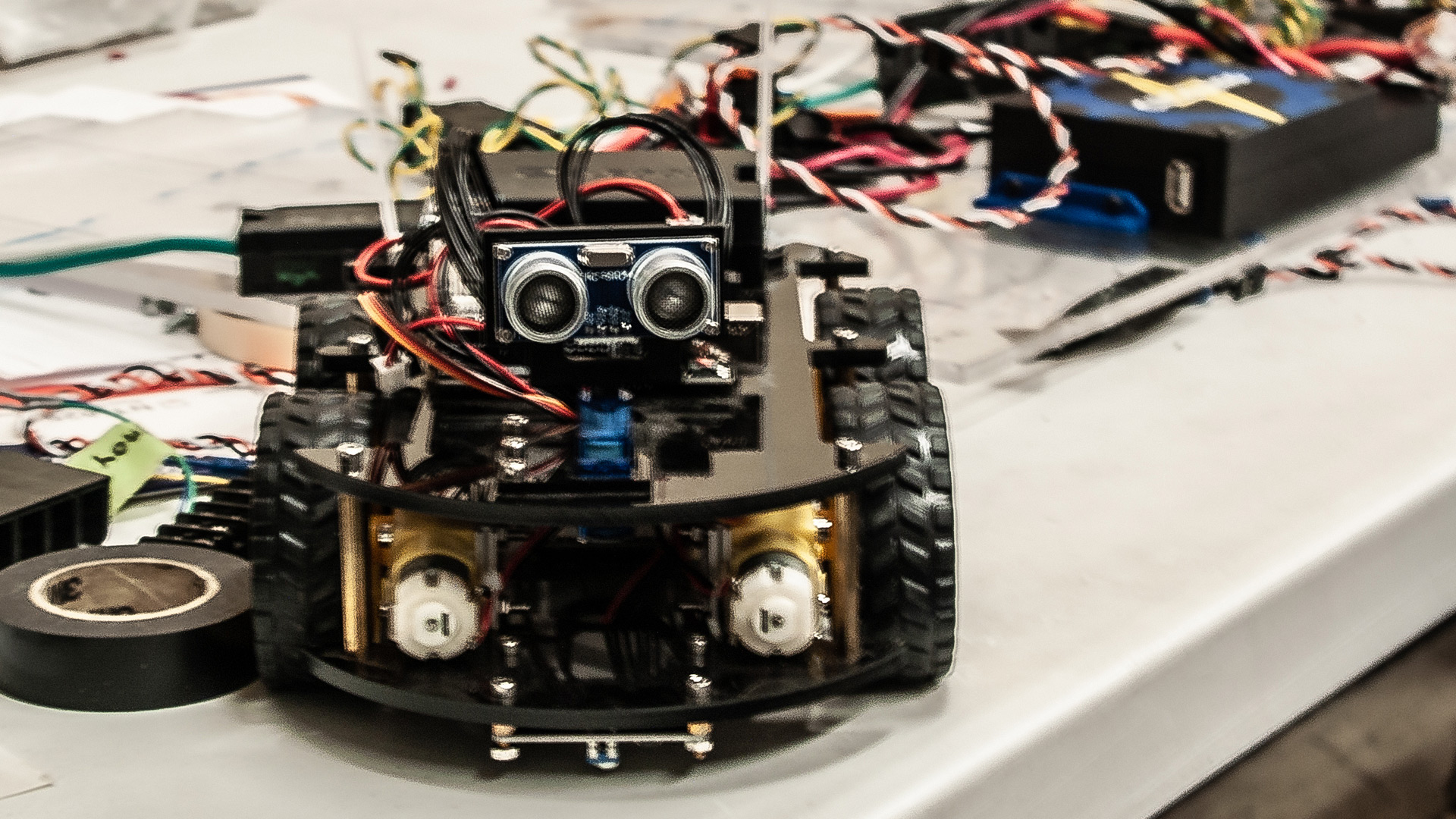
Composants
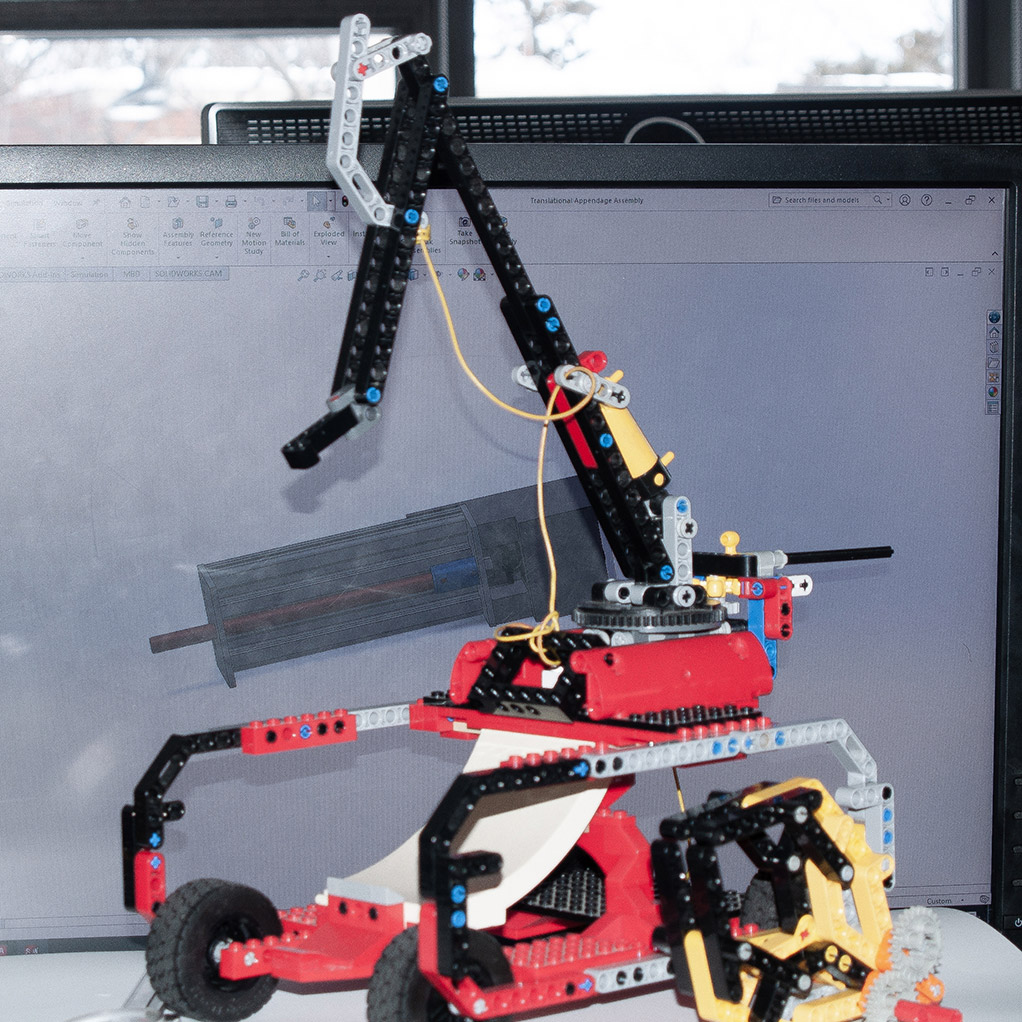
Assemblage

Les trois étapes de notre processus de conception de robots.
Tout d'abord, nous avons travaillé ensemble pour élaborer quelques concepts initiaux. Ensuite, nous avons sélectionné nos caractéristiques préférées dans chaque robot et les avons compilées dans notre prototype principal.
Deuxièmement, nous avons commencé à prototyper chacun des principaux composants du robot. À savoir : le châssis et les roues, le bras et la pince.
Enfin, nous avons commencé à déterminer la disposition et l'assemblage de nos composants. Où ils s'intégreraient et comment ils interagiraient les uns avec les autres.
Pour construire notre robot, nous nous sommes répartis en équipes, chacune étant responsable d'un composant différent du robot. Chaque équipe a reçu des instructions sur la conception prévue, puis les outils et les matériaux nécessaires ont été rassemblés avant la construction. Souvent, nous utilisions des imprimantes 3D pour créer un prototype du composant avant de finaliser la construction.
Châssis et roue
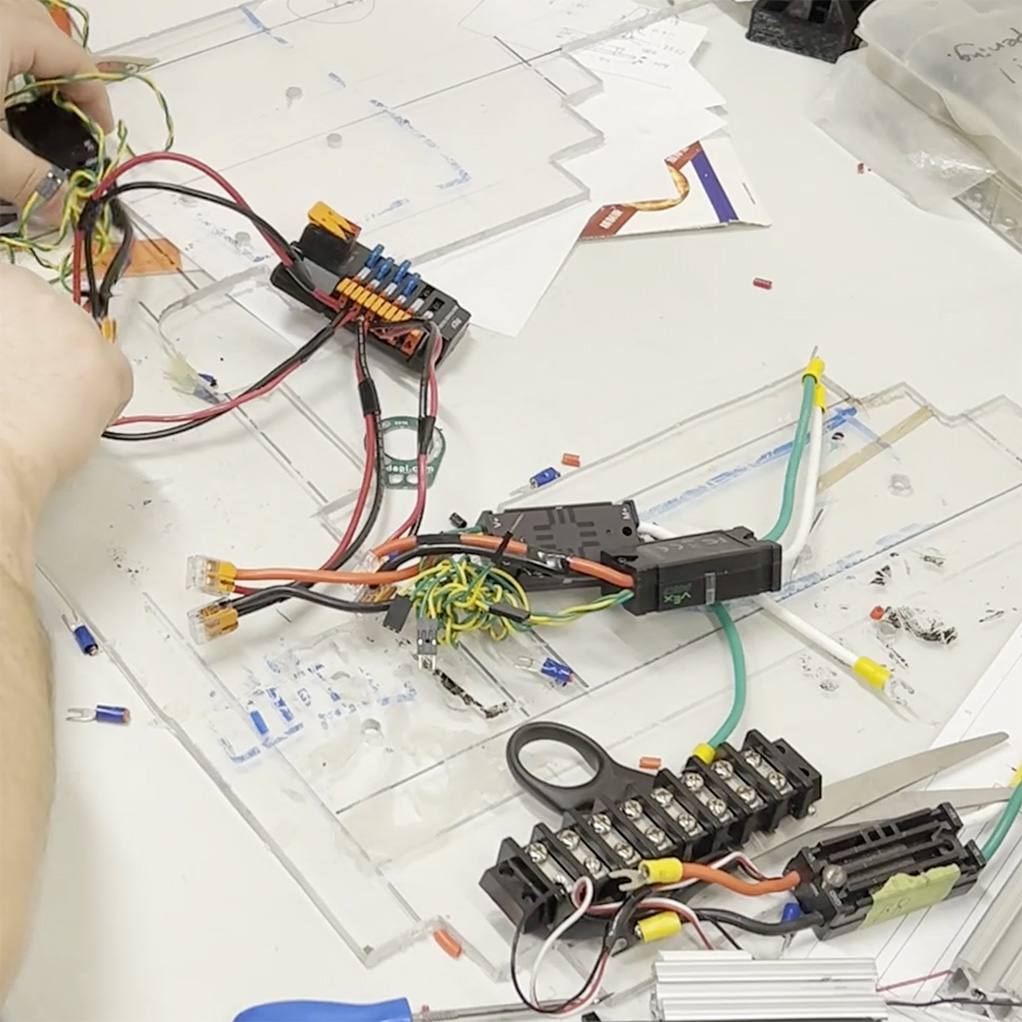
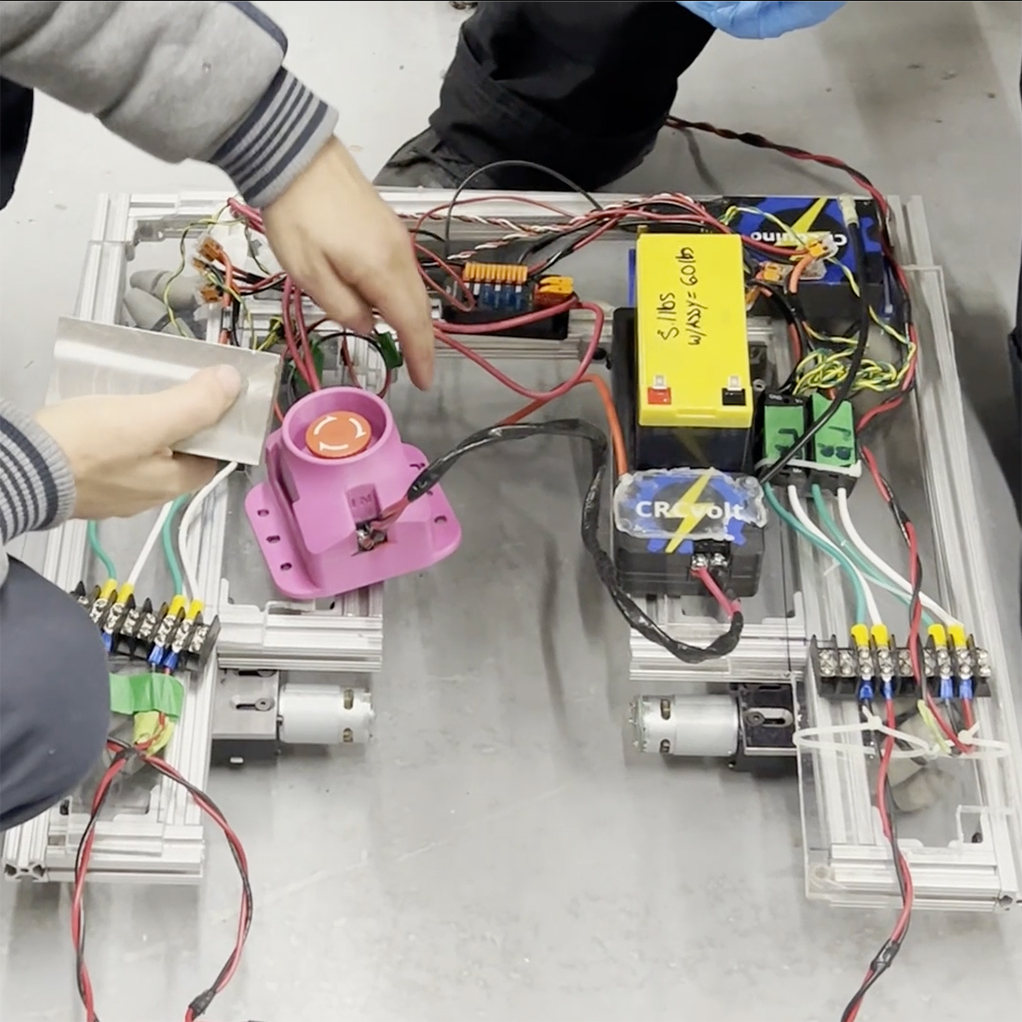
Principaux composants électriques
Bras et griffe
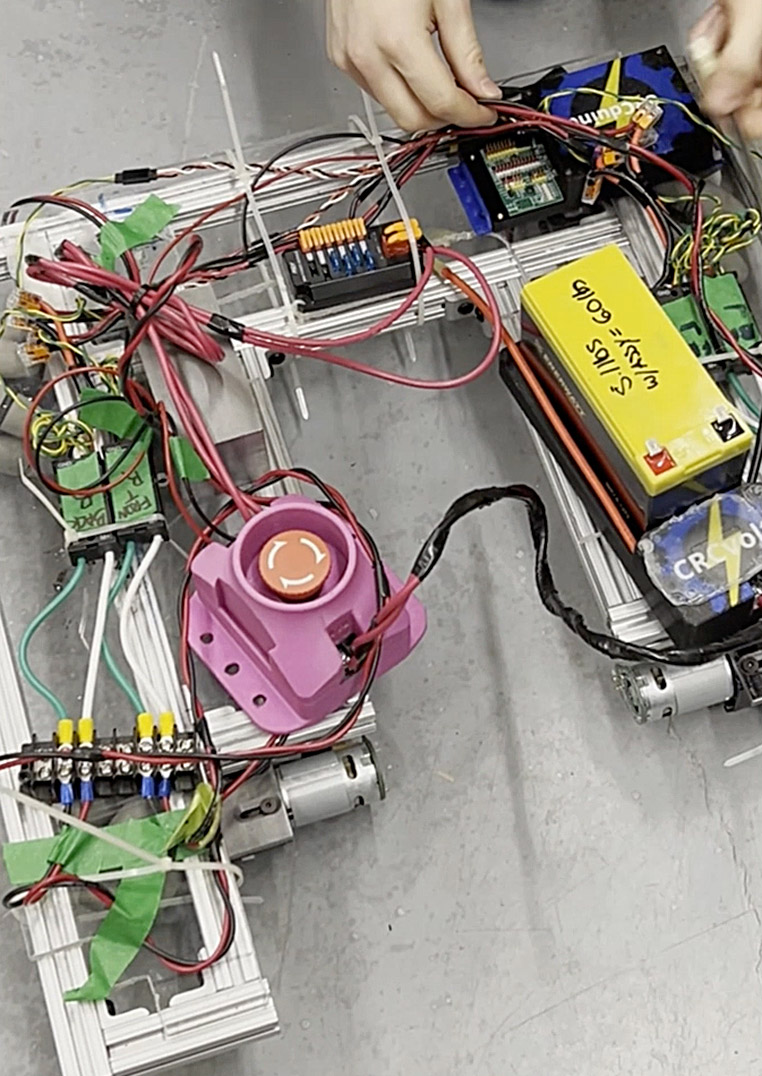
Les trois étapes de notre processus de construction de robots.

La construction a commencé par le châssis et les roues, car ce sont eux qui soutiendraient le reste du robot.
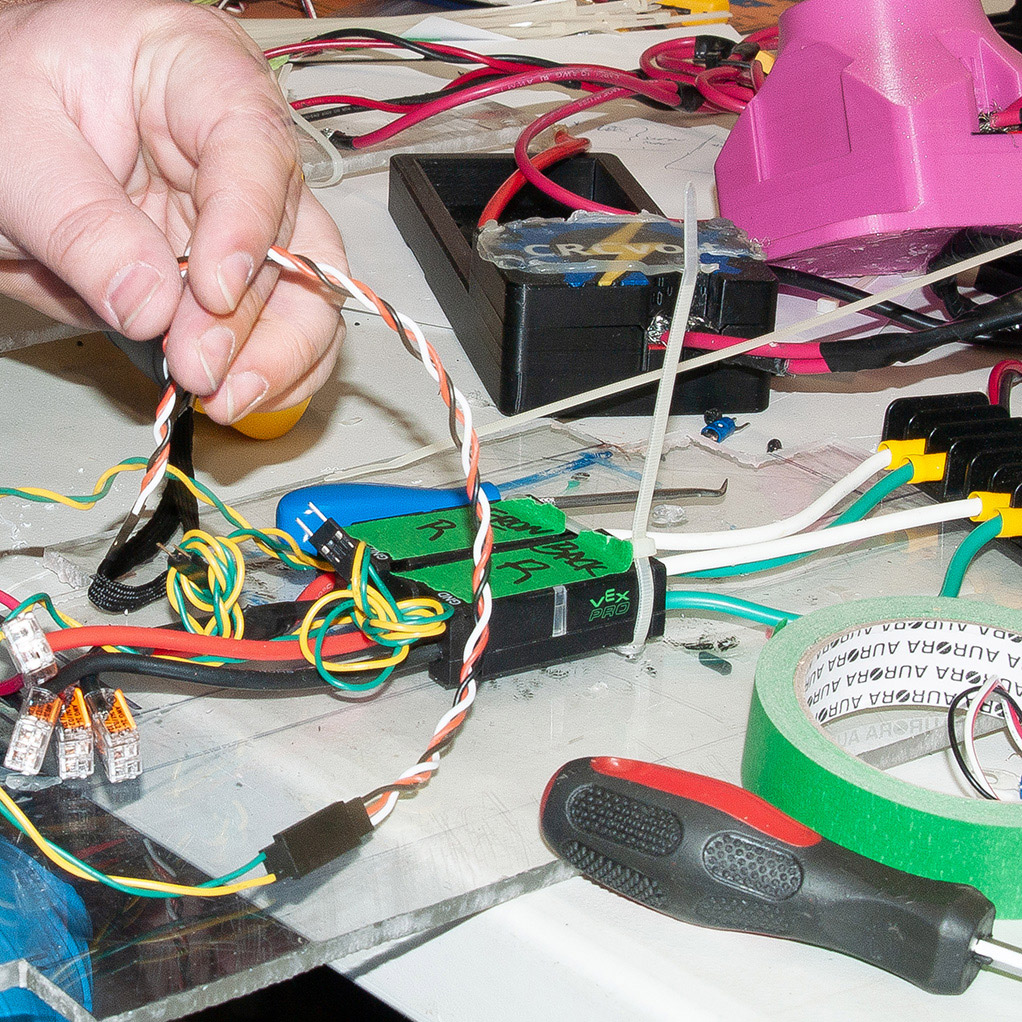
Ensuite, nous avons commencé à disposer et à souder les composants électroniques de base, puis à connecter les commandes de pilotage.
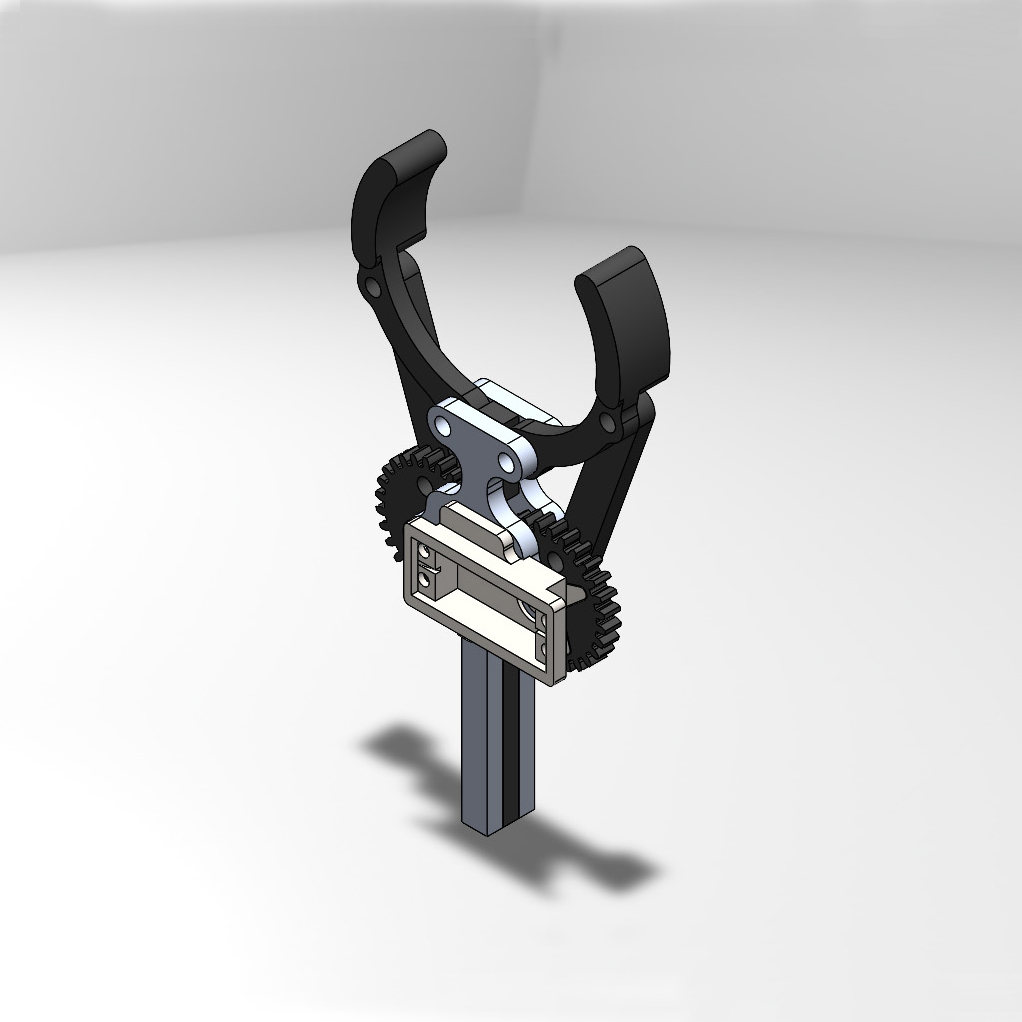
Nous avons ensuite assemblé les composants de notre bras et de notre pince, puis enfin les composants électroniques utilisés pour les contrôler.



Les équipes de robotique CTR