Bienvenue à l'équipe de robotique du Centre de technologie Rosemont. Nous sommes Rosemech !
Notre équipe est composée d'étudiants issus de divers programmes qui travaillent ensemble pour relever les nombreux défis du Moduel. Nous faisons appel à des vétérans de la compétition de l'année dernière (TakTik) et à de nouvelles recrues afin de donner un avantage concurrentiel à notre robot.
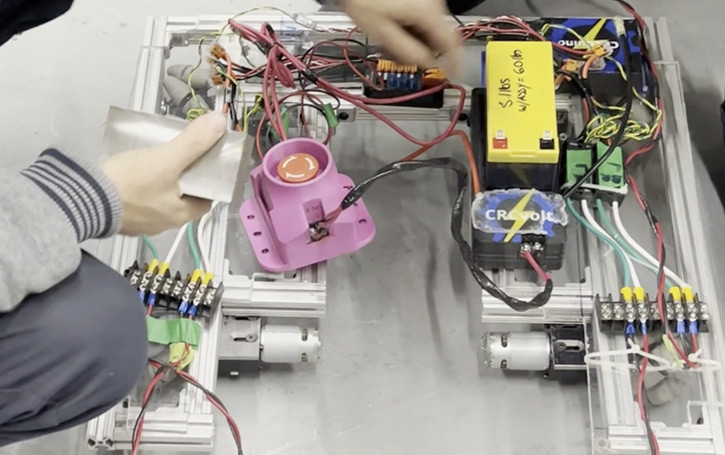
L'équipe Systèmes automatisés en électromécanique est notre groupe d'étudiants le plus important et le plus impliqué. Ses membres ont construit et programmé tous les composants électriques du robot. De la soudure à la programmation en passant par le dépannage, ils sont chargés d'animer et de donner « vie » au robot.
Notre équipe de conception est spécialisée dans les logiciels de CAO et est chargée de veiller à ce que les éléments physiques du robot soient fabriqués avec précision et fonctionnent ensemble. À partir de prototypes, l'équipe de conception a travaillé pour intégrer les meilleures idées du club dans une conception finale. Elle est également chargée de créer les dessins techniques pour la fabrication/l'impression des pièces sur mesure qui composent le robot.
Notre équipe d'ébénistes a travaillé à la conception et à la fabrication de notre kiosque. L'équipe d'usinage a fabriqué des pièces sur mesure de haute précision en acier et en aluminium utilisées dans l'ensemble du robot.
L'équipe de conception graphique s'est chargée de documenter le processus de construction du robot et de le présenter sur le site web qu'elle a créé. Elle a également conçu le logo.


Présentation des membres talentueux et travailleurs de l'équipe de robotique Rosemech.

Capitaine
Capitaine

Designer industriel
Électromécanique

Électromécanique

Électromécanique

Électromécanique

Électromécanique
Électromécanique

Ébénisterie

Ébénisterie
Ébénisterie
Bienvenue à la compétition robotique par équipe Moduel 2026. Dans des matchs à 2 contre 2, les équipes participantes disposeront d'un temps limité à cinq minutes pour utiliser les robots radiocommandés qu'elles ont conçus, construits et programmés afin de marquer le plus de points possible. Sur le terrain sont disposées des rangées de moteurs cassés et des dépôts de pièces de rechange. Les équipes ont pour mission de récupérer les pièces dans les dépôts et de les insérer dans leurs moteurs cassés afin de les réparer. Elles doivent ensuite empiler les pièces restantes pour former une tour. Les équipes seront récompensées par des points pour les moteurs réparés et la hauteur de leur tour.
Centre de technologie Rosemontest l'un des plus grands centres de formation professionnelle technique anglophones au Québec. RTC offre des programmes de formation professionnelle à temps plein – SANS FRAIS DE SCOLARITÉ
Systèmes Automatisés en Électromécanique
Ébénisterie
Menuiserie
Infographie
Finition de mobilier
Dessin industriel (CAD)
Techniques d'usinage
Imprimerie
3737 rue Beaubien E, Montréal, QC H1X 1H2
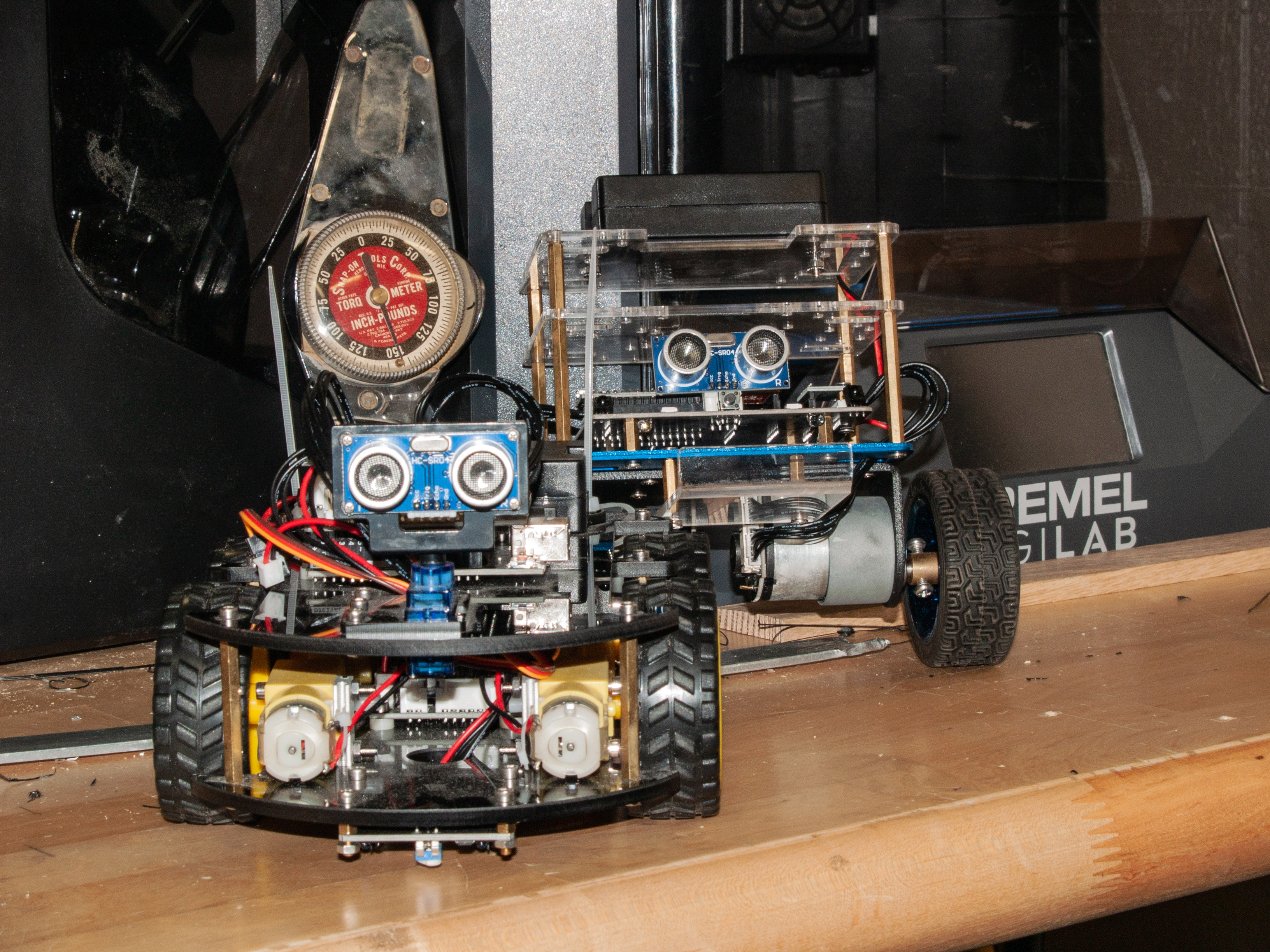
Découvrez notre formidable équipe de robotique, à l'œuvre.
Découvrez-nous en action dans notre vidéo de présentation.
.
Notre équipe a dû relever de nombreux défis tout au long du processus de conception et de construction. En voici quelques exemples.

Le bras
Nous avons un bras long et un couple important à gérer. C'est pourquoi nous avons dû utiliser un moteur pas à pas pour les articulations du premier et du deuxième bras. Ces moteurs sont très puissants, mais n'offrent pas la fluidité dont nous avons besoin pour les mouvements précis du bras. Pour compenser cela, nous avons ajouté un système de courroie et de poulie à notre deuxième articulation, qui agit comme un réducteur et assure une rotation plus fluide.
Capitaine
Roues omnidirectionnelles
Le premier défi que notre équipe de conception a dû relever a été le montage des roues omnidirectionnelles. Pour fonctionner de manière optimale, celles-ci doivent être parfaitement alignées et bien soutenues. Pour ce faire, nous avons utilisé des profilés en aluminium usinés avec précision et des paliers à semelle avec roulements, garantissant un alignement parfait et une conduite fluide !
Capitaine
La Griffe
Pour que les pièces du jeu puissent être insérées dans leurs emplacements, un haut niveau de précision est requis. C'est pourquoi nous avons conçu un système de translation latérale pour la pince, à l'aide d'un actionneur à vis sans fin. Cela permet à la pince de se déplacer parallèlement au bord de l'emplacement. De cette façon, nous ne dépendons pas de nos articulations principales pour obtenir un haut niveau de précision.
Designer industriel
Les équipes de robotique CTR